Проект «CV-Бутобой»
Компанией ООО «Феникс-ТУЛС» выполнены НИОКР по разработке экспериментального образца программно-аппаратного комплекса по управлению бутобоем (4-х осевым гидравлическим манипулятором) с целью полной или частичной автоматизации технологических процессов дробления и расчистки горной массы на грохотной решетке рудоспуска горнодобывающих шахт.
НИОКР выполнен при финансовой поддержке ФГБУ «Фонд содействия развитию малых форм предприятий в научно-технической сфере» в рамках федерального проекта «Искусственный интеллект» национальной программы «Цифровая экономика Российской Федерации».
Целью выполнения проекта было повышение уровня промышленной безопасности и операционной эффективности выполнения технологических работ по дроблению и расчистке горной массы на грохотных решетках рудоспуска шахт горнодобывающих предприятий.
В ходе выполнения проекта были произведены разработка, тестирование и подтверждение готовности к внедрению в реальное производство экспериментального образца «Системы машинного зрения для бутобоев с функционалом автоматического управления процессом дробления камней в условиях шахты без привлечения оператора».
Для реализации системы были разработаны и использованы:
- алгоритмы машинного (компьютерного) зрения с применением технологий искусственного интеллекта;
- методы цифрового управления промышленным оборудованием, включающие в себя разработку управляющих программ с верификацией и имитацией производственных процессов;
- передовые технологии цифровизации управления гидравлическим манипулятором.
Все это было объединено в единую интеллектуальную систему автоматизации процесса работы и управления.
В итоге, «Система машинного зрения для бутобоев с функционалом автоматического управления процессом дробления камней в условиях шахты без привлечения оператора» включает в себя:
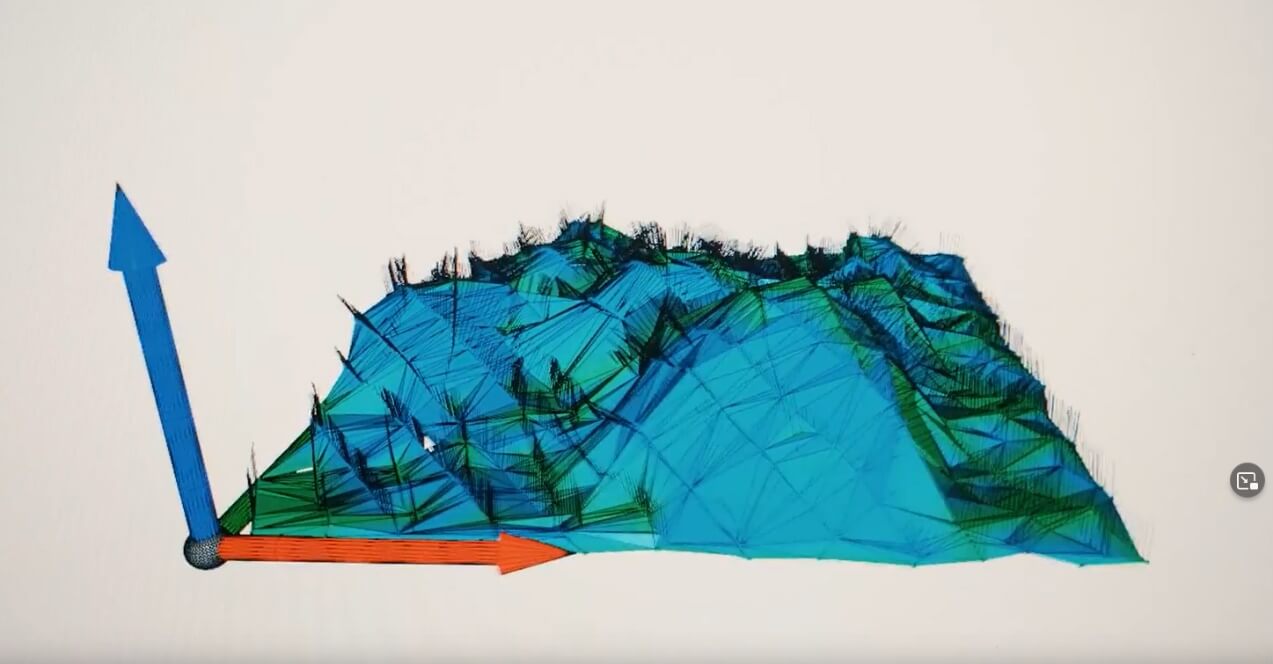
- подсистему 2D и 3D машинного зрения;
- подсистему автоматического принятия решений;
- подсистему управления движением и мониторинга работы бутобоя.
Каждая из указанных выше подсистем состоит из аппаратной части и программных модулей, каждый из которых выполняет свой функциональный блок.
Аппаратная часть необходимая для функционирования системы состоит из следующих основных элементов:
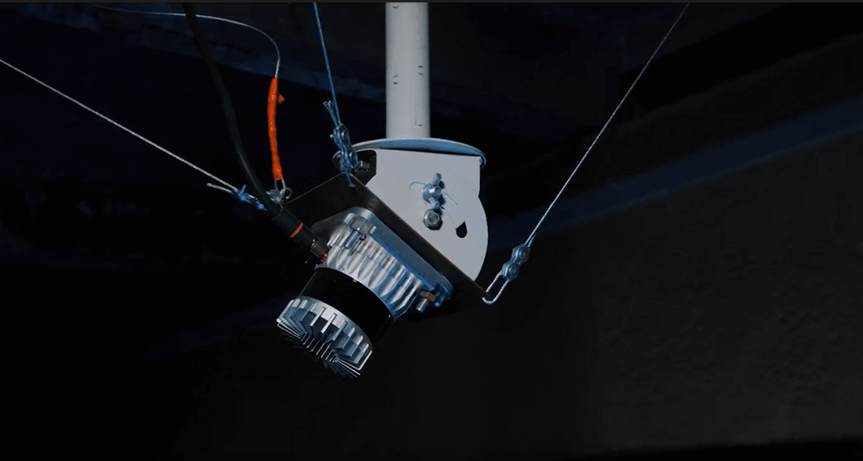
3D- и 2D-камеры в защитных кожухах;
- серверное и сетевое оборудование подсистемы машинного зрения, помещенные в специальный шкаф для работы в условиях шахты;
- электронное оборудование подсистем управления движением и мониторинга работы бутобоя с сервером подсистемы принятия решений и с встроенным блоком управления бутобоем, помещенные в специальный шкаф для работы в условиях шахты;
- АРМ оператора – пульт дистанционного управления для реализации автоматизированного режима управления бутобоем на базе персонального компьютера.
Для проведения испытаний системы был использован бутобой Impulse M630R, производства ООО «Импульс-Бутобойные системы», г. Москва, предоставленный производителем для отладки и испытаний системы.

Программная часть системы, состоит из следующих программных модулей, полностью обеспечивающих реализацию функционала системы:
- модуль контроля позиционирования элементов бутобоя
- модуль контроля горнорудной массы на грохотной решетке (статика)
- модуль предобработки видеопотока
- модуль оценки состояния целевого объекта (динамика)
- модуль оценки изменения состояния целевого объекта обработки
- модуль оценки результатов обработки (окончание работы или вызов оператора)
- модуль оценки состояния комплекса и окружающих объектов
- модуль формирования решения по действиям с горнорудной массой на грохотной решетке и выбора целевого объекта обработки
- модуль выполнения управляющих программ
- модуль управления движениями бутобоя
- модуль безопасности
- модуль аварийного останова
- модуль мониторинга работы бутобоя
- модуль контроля периферийных датчиков
- модуль визуализации для цифрового управления бутобоем в условиях шахты
Система обеспечивает следующие ключевые характеристики качества и параметры:
- фиксация факта наличия крупных элементов горнорудной массы размером более750х750мм (определяется размером ячейки грохотной решетки);
- частота отслеживание изменения положения целевых объектов сцены в процессе обработки не реже 1 раза в секунду;
- определение положения и размеров крупных элементов горной массы с точностью не хуже 50 мм;
- точность определение координат ключевых элементов бутобоя не хуже 40 мм;
- обеспечение перевода молота в требуемую точку с точностью не хуже 30 мм;
- обеспечение режима дробления камней с задержкой не более 1 секунды;
- обеспечение принятия решений при выборе цели обработки не более 5 секунд.
- формирование аварийного сигнала останова не позднее чем через 1 секунду после определения факта возникновения нештатной ситуации;
По результатам выполнения проекта проведена регистрация прав на интеллектуальную собственность на два программных продукта (программы для ЭВМ), являющихся как функциональными элементами подсистем машинного зрения и автоматического принятия решений, так и способные работать автономно:
* * *
В октябре 2023г. компанией ООО «Феникс-ТУЛС» успешно получен Сертификат соответствия ТРТС и Сертификат разрешающий работы нашей системы на Руднике, соответствие ГОСТ 24754-2013, ГОСТ 30852.20-2002